
-ts1611161472.jpg?ts=1783621248)

-ts1611161473.jpg?ts=1783621248)

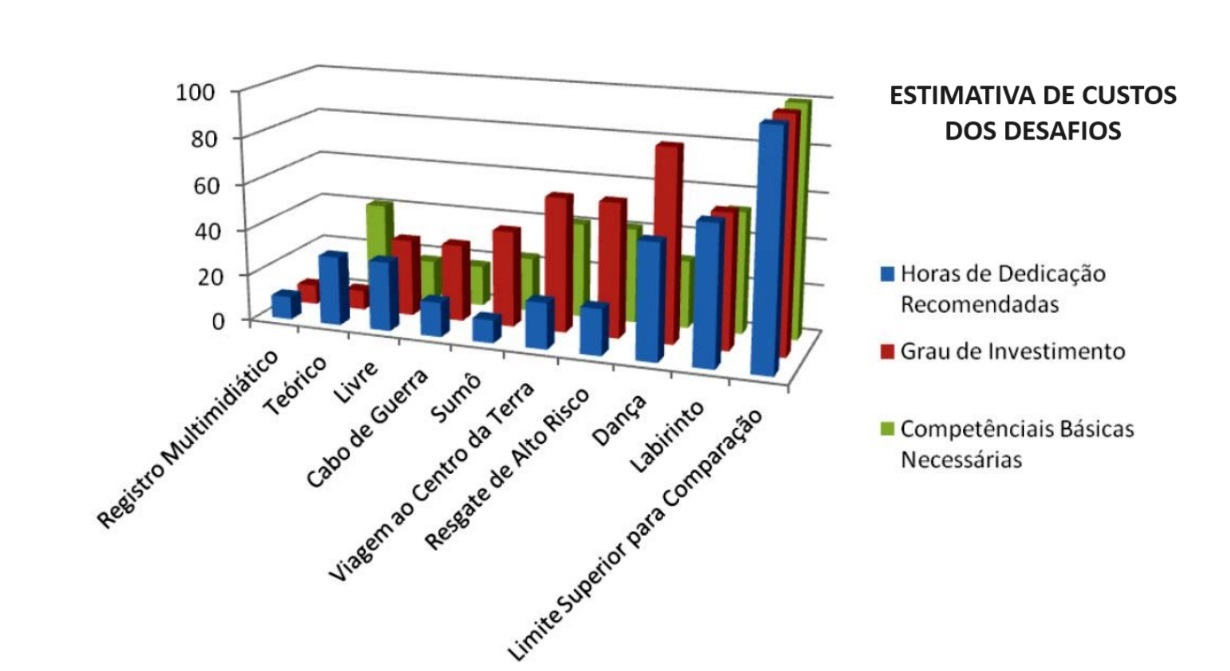
DICAS!!!
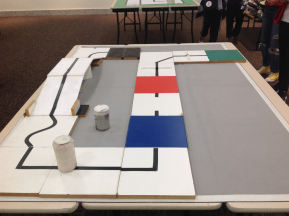
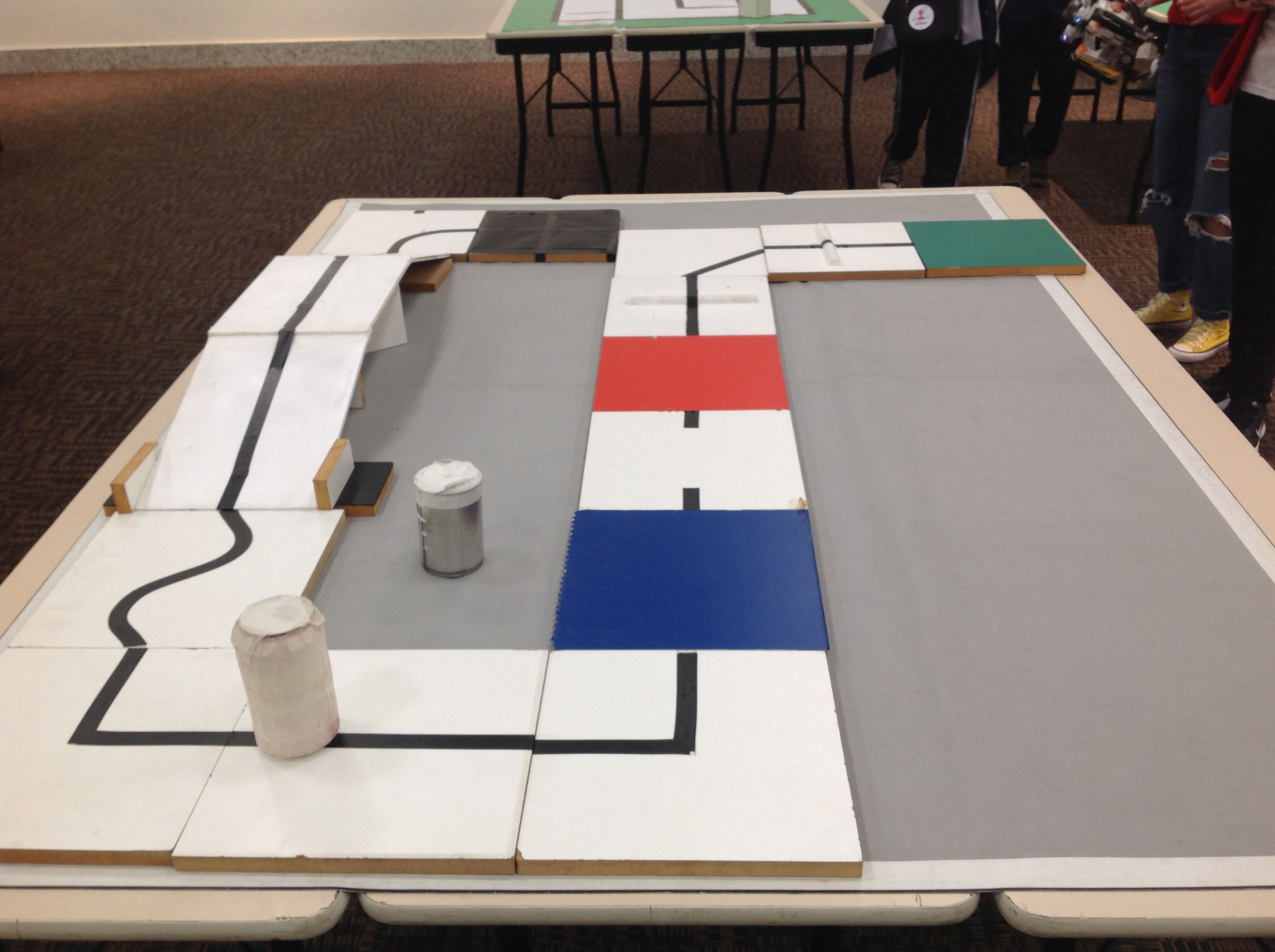
O desafio busca abordar necessidades típicas de carros autônomos que visam a cumprir um percurso predeterminado com o máximo de eficiência possível. Trata-se, portanto, de um desafio de robótica bastante sofisticado, que congrega uma ampla gama de problemas que devem ser resolvidos antes que se atinja um nível mínimo de sucesso com confiabilidade. Dentre esses problemas, podem ser apontados ao menos três fundamentais: 1. O carro é muito mais estreito do que a via e suas balizas laterais, o que dificulta correções mais adequadas a partir de sensores de linha; 2. Os carros devem realizar ultrapassagem sem colidir, o que significa vencer um obstáculo em movimento em relação ao chão; 3. Os carros devem buscar atingir a maior velocidade possível e, ainda assim, serem precisos na mudança de suas trajetórias com intuito de evitar colisãoou evasão da pista.
The challenge seeks to address typical needs of autonomous cars that aim to follow a predetermined route as efficiently as possible. It is, therefore, a very sophisticated robotics challenge, which brings together a wide range of problems that must be solved before a minimum level of success can be achieved with reliability. Among these problems, at least three fundamental ones can be identified: 1. The car is much narrower than the road and its side markers, which makes more adequate corrections using line sensors difficult; 2. Cars must overtake without colliding, which means overcoming an obstacle moving in relation to the ground; 3. Cars must seek to reach the highest speed possible and, even so, be precise in changing their trajectories in order to avoid collisions or avoidance of the lane.
El desafío busca abordar las necesidades típicas de los automóviles autónomos que tienen como objetivo seguir una ruta predeterminada de la manera más eficiente posible. Se trata, por tanto, de un desafío robótico muy sofisticado, que reúne una amplia gama de problemas que deben resolverse antes de poder alcanzar un nivel mínimo de éxito con fiabilidad. Entre estos problemas se pueden identificar al menos tres fundamentales: 1. El coche es mucho más estrecho que la carretera y sus balizas laterales, lo que dificulta correcciones más adecuadas mediante sensores de línea; 2. Los automóviles deben adelantar sin chocar, lo que significa superar un obstáculo que se mueve con respecto al suelo; 3. Los coches deben buscar alcanzar la mayor velocidad posible y, aun así, ser precisos en los cambios de trayectoria para evitar colisiones o evasiones de carril.
As provas de arrancada são competições onde dois veículos preparados, ou até mesmo em seu estado original, disputam uma corrida dentro de uma reta nivelada, saindo do estado imóvel, para ver quem faz o percurso em menor tempo. É comum que uma pista de arrancada tenha um quarto de milha, que equivale a pouco mais de 400 metros, ou seja, o carro que tiver a melhor arrancada, vence a prova, já que é um espaço muito curto.
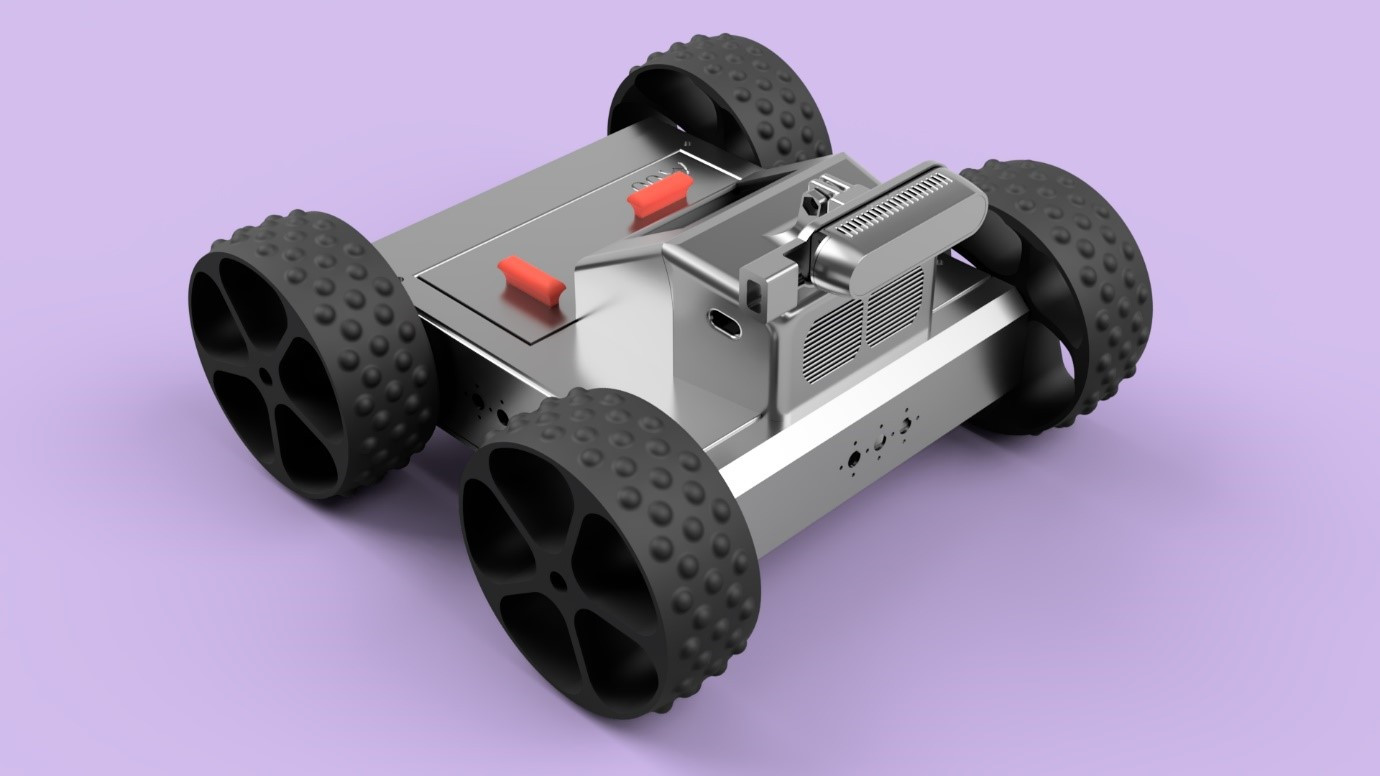
No caso de preparar carros sob a perspectiva da robótica e fazê-los competir em pistas curtas da prova aqui proposta, significa, na prática, colocar para competir dois carrinhos robóticos cuja construção de cada um seja limitada ao máximo de 0,20m de largura e 0,30m de comprimento para percorrer o mais rápido possível uma pista de 5,00m.
Drag races are competitions where two prepared vehicles, or even in their original state, compete in a race on a level straight, leaving the immobile state, to see who can complete the route in the shortest time. It is common for a drag strip to be a quarter of a mile long, which is equivalent to just over 400 meters, that is, the car that has the best start wins the race, as it is a very short space.
In the case of preparing cars from a robotics perspective and making them compete on short tracks in the test proposed here, this means, in practice, putting two robotic cars into competition, the construction of each of which is limited to a maximum of 0.20m in width and 0.30m long to cover a 5.00m track as quickly as possible.
Las carreras de resistencia son competiciones donde dos vehículos preparados, o incluso en su estado original, compiten en una carrera en recta llana, saliendo del estado inmóvil, para ver quién puede completar el recorrido en el menor tiempo. Es común que una pista de drag tenga una longitud de un cuarto de milla, lo que equivale a poco más de 400 metros, es decir, el auto que tenga la mejor salida gana la carrera, al ser un espacio muy corto.
En el caso de preparar los coches desde el punto de vista robótico y hacerlos competir en pistas cortas en la prueba aquí propuesta, esto significa, en la práctica, poner en competición dos coches robóticos, cuya construcción de cada uno de ellos está limitada a un máximo de 0,20 m. de ancho y 0,30m de largo para cubrir una pista de 5,00m lo más rápido posible.


VIAGEM: AO CENTRO DA TERRA
Corrida: de carros autônomos
CORRIDA: DE ARRANCADA
RACE: DRAGSTER
CARRERAS: DRAGSTER
RACING: AUTONOMOUS CAR
cARRERAS: de Coches Autonomos
O ser humano sempre se perguntou sobre o que há acima e abaixo dele. Assim como a abóbada celeste, os caminhos abaixo da crosta terrestre já despertaram a atenção da maioria das pessoas, até quando usam o metrô ou entram em alguma construção subterrânea. A literatura de ficção também já experimentou esse devaneio, como pode ser lido em Viagem ao Centro da Terra, de Júlio Verne, conhecido romancista do século XIX. Neste romance, três aventureiros seguem informações misteriosas para encontrar um caminho que os levasse ao centro da Terra. Encontraram, no decorrer do percurso, vastas câmaras, com animais extraordinários e homens-das-cavernas. No desafio proposto - Viagem ao Centro da Terra -, os alunos são convidados a criar um robô que faça novamente esse caminho, encontrando a câmara central e trazendo um artefato como prova de existência do Centro da Terra. O caminho é considerado conhecido e o robô deve, em atuação completamente autônoma, encontrar a câmara central, coletar o artefato (um cubo) e retornar com o objeto alvo ao ponto de partida.
Human beings have always wondered about what is above and below them. Just like the celestial vault, the paths beneath the Earth's crust have already caught the attention of most people, even when using the subway or entering some underground construction. Fiction literature has also experienced this reverie, as can be read in Journey to the Center of the Earth, by Jules Verne, a well-known 19th century novelist. In this novel, three adventurers follow mysterious information to find a path that would lead them to the center of the Earth. Along the way, they found vast chambers, with extraordinary animals and cavemen. In the proposed challenge - Journey to the Center of the Earth -, students are invited to create a robot that takes this path again, finding the central chamber and bringing an artifact as proof of the existence of the Center of the Earth. The path is considered known and the robot must, in completely autonomous action, find the central chamber, collect the artifact (a cube) and return with the target object to the starting point.
El ser humano siempre se ha preguntado qué hay encima y debajo de él. Al igual que la bóveda celeste, los caminos bajo la corteza terrestre ya han llamado la atención de la mayoría de las personas, incluso cuando utilizan el metro o ingresan a alguna construcción subterránea. La literatura de ficción también ha experimentado esta ensoñación, como se puede leer en Viaje al centro de la Tierra, de Julio Verne, conocido novelista del siglo XIX. En esta novela, tres aventureros siguen una información misteriosa para encontrar un camino que los lleve al centro de la Tierra. En el camino, encontraron amplias cámaras, con animales y hombres de las cavernas extraordinarios. En el desafío propuesto - Viaje al Centro de la Tierra -, se invita a los estudiantes a crear un robot que retome este camino, encontrando la cámara central y trayendo un artefacto como prueba de la existencia del Centro de la Tierra. El camino se considera conocido y el robot debe, en acción completamente autónoma, encontrar la cámara central, recoger el artefacto (un cubo) y regresar con el objeto objetivo al punto de partida.
JOURNEY: to the center of the earth
VIAJE: AL CENTRO DE LA TERRA

-ts1611161474.jpg?ts=1783621248)

-ts1611161474.jpg?ts=1783621248)

-ts1611161474.jpg?ts=1783621248)





















-ts1611162601.jpg?ts=1783621248)

-ts1611162600.jpg?ts=1783621248)

-ts1611163299.jpg?ts=1783621248)

-ts1611163298.jpg?ts=1783621248)
-ts1611161473.jpg?ts=1783621248)







-ts1611008634.jpg?ts=1783621248)

-ts1611162601.jpg?ts=1783621248)